marine gyro stabilizers
What is a Boat Gyro stabilizer?
A Boat Gyro stabilizer is a device for reducing the rolling motion of boats and ships in waves.
marine gyro stabilizers
A Boat Gyro stabilizer is a device for reducing the rolling motion of boats and ships in waves.
A Boat Gyrostabilizer like the VEEM Marine Gyro stabilizers comprises a spinning flywheel mounted in a gimbal frame allowing two of the three possible rotational degrees of freedom. The frame is then rigidly mounted to a location on the vessel. Most often the device is located in the engine room of the vessel but can be mounted at any location (does not need to be mounted on vessel centerline).
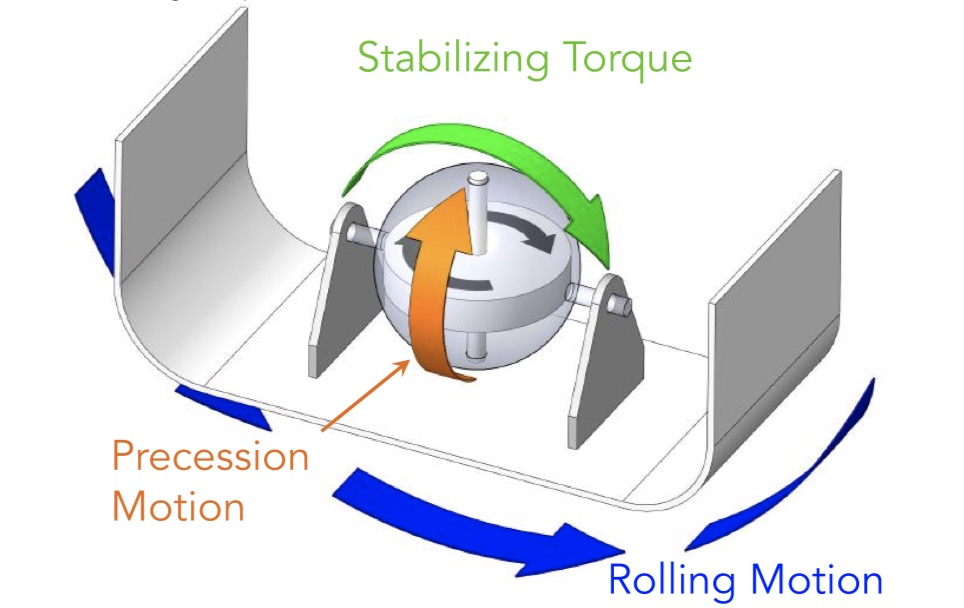
The specific way in which the flywheel is constrained in rotational motion allows the angular momentum of the spinning flywheel to combine with the flywheel’s precession oscillation to generate large torques which vary with time to directly oppose the dynamic rolling motion caused by waves.
Without any intervention, the vessel rolling motion combines with the flywheel angular momentum to cause oscillating process motion. This then combines with the angular momentum to create stabilizing torque, which directly opposes the wave-induced rolling motion of the vessel. All this happens in the same instant and is perfectly synchronised.
By arranging the gimbals in a specific way, a roll stabilizing device is created using the naturally occurring physics of gyro-dynamics, which requires no further intervention in order to function.
For VEEM Marine’s Boat Gyro stabilizers, precession motion is the oscillation back and forth through a maximum of ±70 degrees in the vessel’s pitching axis. Precession rate, is the rotational speed of this oscillation. Angular momentum is the rotational inertia of a body, multiplied by the speed of rotation. This is a rotational analog to linear momentum where the momentum is equal to the mass of the body multiplied by its speed of movement.
The unique gyro-dynamics established by the specific gimbaling arrangement means that without any intervention, the vessel rolling motion combines with the flywheel angular momentum to cause oscillating precession motion. Again without any intervention, the precession motion combines with the flywheel angular momentum to create stabilizing torque, which directly opposes the wave-induced rolling motion. Note that the precession oscillation is caused by the rolling motion, in a plane at 90 degrees to the rolling motion (the pitch axis), and then, in turn, the stabilizing torque is caused by the precession motion in a plane at 90 degrees to the precession motion (the roll axis). All of this happens at the same instant so that the stabilizing torque is perfectly synchronised to the wave-induced rolling motion. This is a unique and advantageous feature of gyro stabilizers.
So, by arranging the gimbals in a specific way, a roll stabilizing device is created using the naturally occurring physics of gyro- dynamics. This gyro-dynamics requires no further intervention in order to function…except in the case where the stabilizing torque created is less than the wave-induced rolling torque and the rolling motion is not completely attenuated.
Unfortunately, this is almost always the case as all mechanical devices have limited capacity. There is a limit to the size and mass of gyrostabilizer that can practically be installed in any given vessel. Therefore, intervention is required in order to manage the precession rotation.
There are two aspects of the precession motion that must be managed; the angular range, and the rate of precession.
The gyro-dynamic torque acts in the plane of the flywheel spin axis, and the athwart-ship (side to side of the vessel) precession axis. Therefore, a component of the gyro-dynamic torque acts in the rolling plane, but when the precession angle is away from vertical, a component of the gyro-dynamic torque also acts in the yaw (or steering) axis of the vessel (for vertical-spin-axis gyros). Because the inertia and damping of the yaw axis are much higher than in the roll axis, this so-called cross-torque is insignificant and does not affect steering. However, at 90 degrees precession angle, the effective roll stabilizing torque becomes zero, so angles approaching 90 degrees should be avoided. Practically, the precession angular range should be limited to within say +/- 70 degrees.
The gyro-dynamic torque created by the combination of the flywheel angular momentum and the precession oscillation is proportional to the angular momentum and also to the precession rate. So at a fixed rpm, the angular momentum is a constant. Therefore, the gyro-dynamic torque is directly proportional to the precession rate. This is interesting because it leads to the conclusion that if the flywheel was to precess very quickly, up to infinitely quickly, then a gyro could theoretically produce an infinite gyro-dynamic torque. In order to limit the amount of gyro-dynamic torque created (to allow a practical structure to be built to contain the loads), the precession rate must be controlled or limited.
So our perfect stabilizing device, created by a specific set of gimbal constraints, works automatically due to physics. However, the precession oscillation range and the rate of precession oscillation must be managed to within desirable limits. For VEEM Marine Gyro stabilizers, this is the role of the hydraulic cylinders and the electronic control system.
The key technical features that differentiate modern marine gyrostabilizer products are as follows:
Explore the following below:
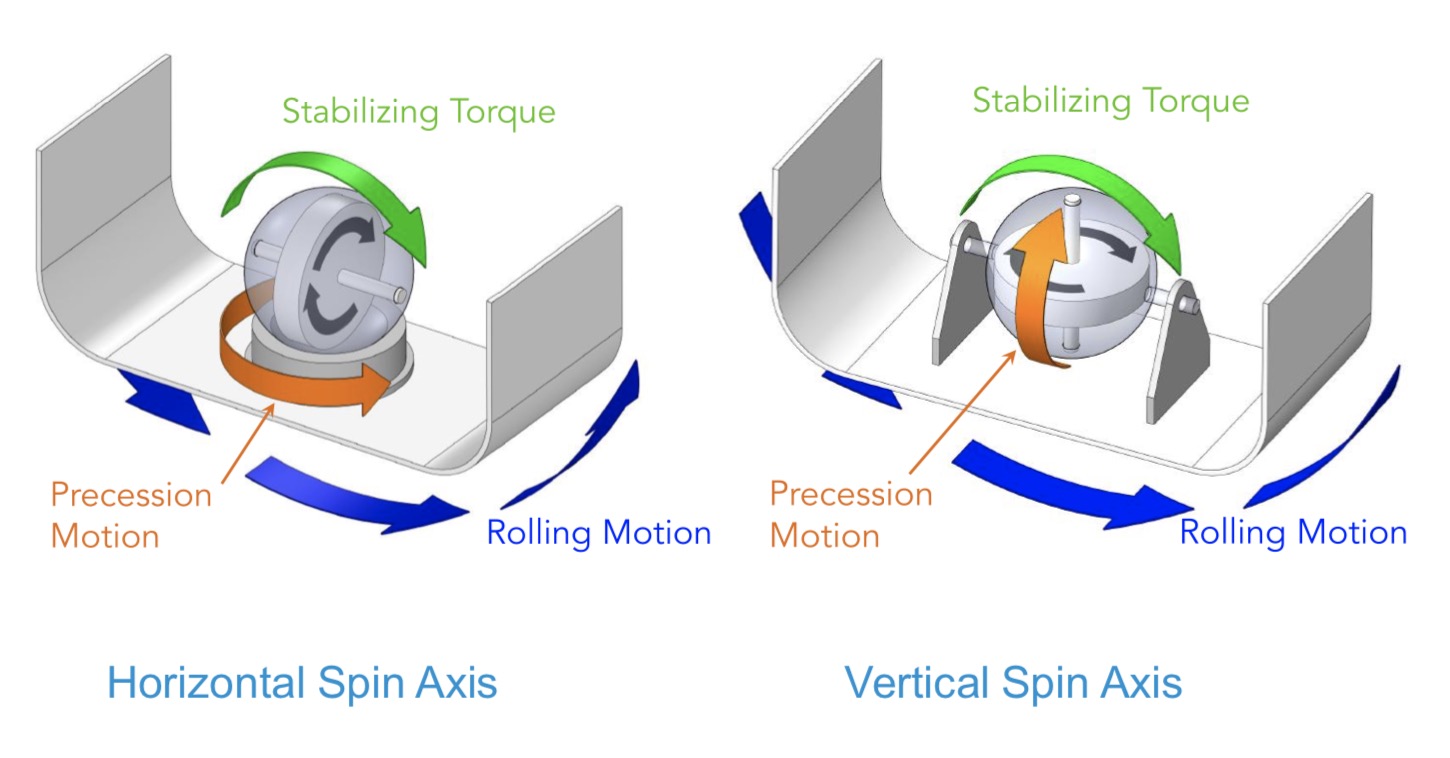
Although theoretically both of these approaches produce effective stabilizing torque, there are a couple of noteworthy differences. The main problem with a horizontal spinning axis is that it does not allow the use of natural precession. The resistance of the slewing-ring type bearings used is excessive, and requires that the precession motion be driven to overcome this resistance.
Another limitation of a horizontal spin axis is that it is not convenient to provide the precession motion with an equilibrium point at zero precession angle. For vertical-spin-axis gyro stabilizers, it is possible to arrange the precession bearing shafts so that the CG of the cage assembly holding the flywheel is lower than the shaft line. This ensures that the precession angle always tends towards vertical. This feature allows the advantages of natural precession (see over) to be utilised.
VEEM Marine Gyro stabilizers all feature a vertical spinning axis.
Gyrostabilizer precession motion is a naturally occurring response. Utilising this naturally-occurring-precession-motion means that the stabilizing torque of the gyro is always perfectly synchronised with the vessel roll, regardless of how quick, slow or random the rolling motion may appear. This eliminates any inefficiencies caused by slow sensors, electrical or hydraulic systems and ensures a perfectly timed response in all conditions.
For vessels with longer roll periods, the lower roll rate in small waves may result in less torque created to provide full precession range. This can create a band of rolling motion in which the gyrostabilizer either does not respond, or responds less vigorously than it could. Onboard, this may be seen as a lack of responsiveness in small waves. Driving the precession motion, can virtually eliminate this dead-band.
This option may be advantageous for some mega- yachts, or larger commercial vessels. The downside is the additional power requirement, additional space, and additional cost of the motive power unit. The driven precession option requires either PTO hydraulic pumps or a separate power pack.
VEEM Marine Gyro stabilizers are supplied with either natural or driven precession.
Most modern gyro stabilizers feature active precession control. This is a key technology advancement that gives modern gyro stabilizers their high efficiency across a wide range of conditions. VEEM Marine Gyro stabilizers have a highly sophisticated control system which is a point of differentiation to other market offerings.
In order to ensure optimal performance across a wide range of wave conditions without the need for user adjustments, the control system should also be adaptive. Adaptive control systems automatically search for optimal control settings without needing to be tuned by an operator. When executed well, this means the system is both simple to use, and also continually optimised.
VEEM Marine Gyro stabilizers all feature active, adaptive control systems.
A key, but often over-looked feature of gyro stabilizers is the robustness of the base frame and the precession-motion-control system. As larger waves cause larger rolling rates, the torque induced in the precession axis continues to grow. In order to control the increased precession rates, the mechanism for controlling the precession motion must be able to over- come these ever increasing torques.
When the torque induced in the precession axis exceeds the capacity of the precession control mechanism, the gyro must either shut down to protect itself from damage or progressively de-rate to achieve the same. An under-sized precession control mechanism will result in premature shut-down as wave conditions build.
VEEM Marine Gyro stabilizers are designed and built to ensure that they continue to provide roll stabilization as seas become severe.
There are three inter-twined parts to the process of creating gyro- stabilizing torque. Note that each of these things is simultaneously occurring at the same instant in time, but it is helpful to consider each of them separately. Once the flywheel is spinning, the following process leads to the development of a stabilizing torque that opposes rolling motion:
The physics that causes these inter-twined actions is called gyro-dynamics. If the flywheel spins in the opposite direction, the induced precession motion will be in the opposite direction, but the stabilizing torque will be identical.
The Fundamentals
The fundamentals of gyro-dynamics are that if a torque is applied to a spinning mass (flywheel) in a plane containing the spin axis, then this torque is bent through 90 degrees by the flywheel’s angular momentum. There is a direct mathematical relationship between the torque initially applied and the rate of rotation created in the axis at 90 degrees. You may have noticed that when you handle a spinning angle grinder it feels strange. This is because as you rotate the grinder in your hands, gyro-dynamics applies a torque at right angles to the rotation. This is what gives the strange sensation that the grinder is trying to wriggle out of your hands.
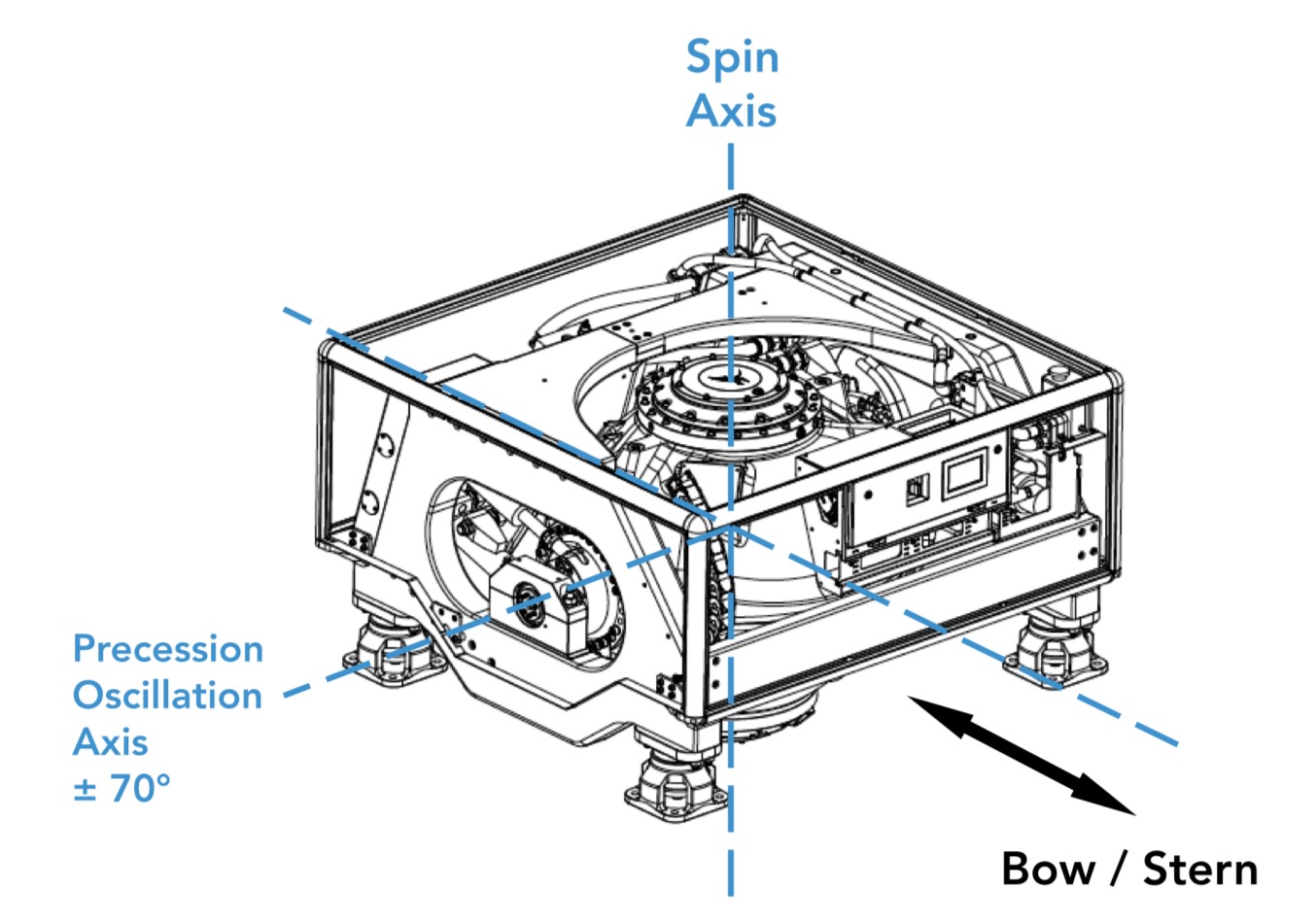
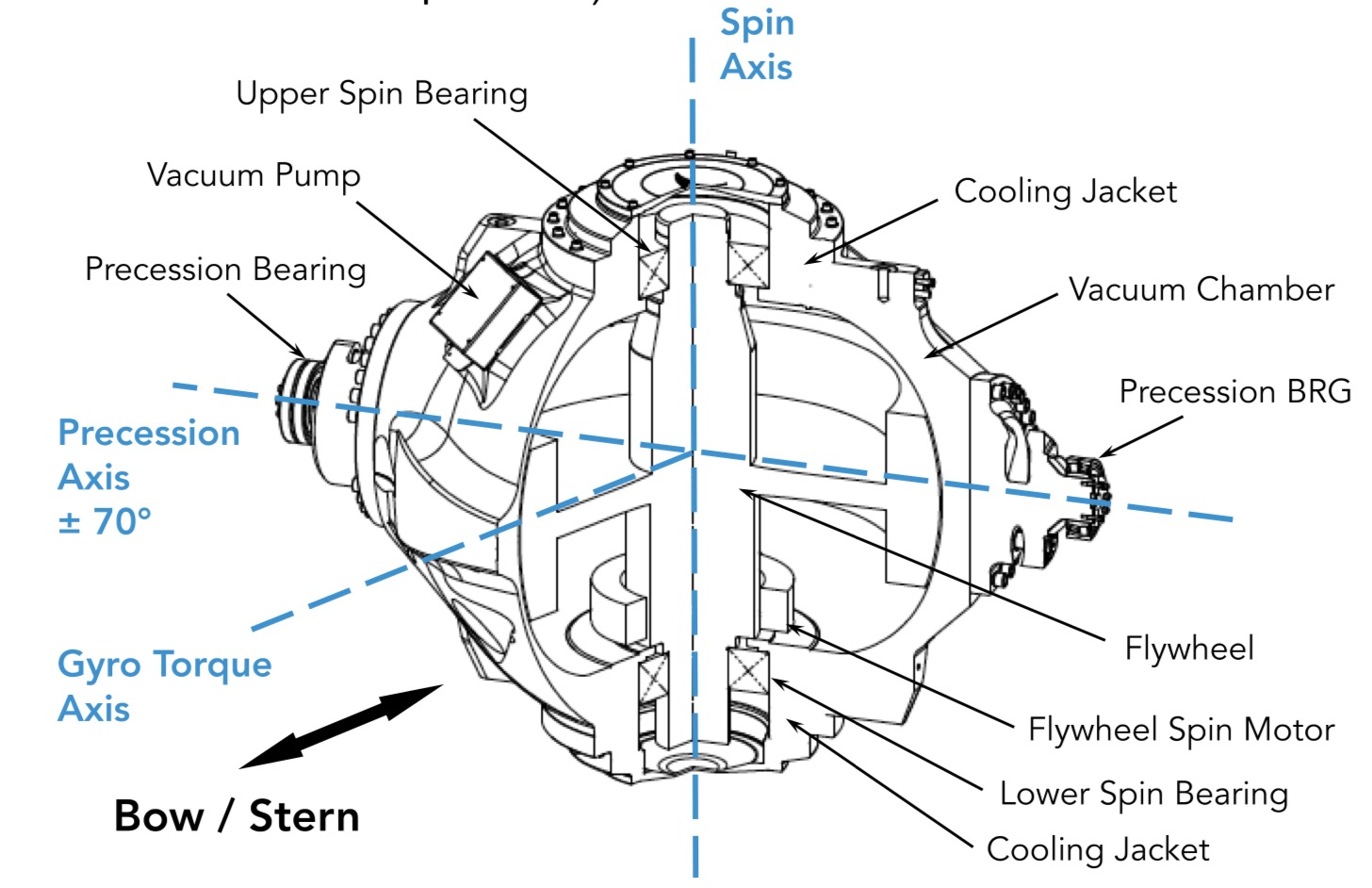
How the VEEM Marine Gyrostabilizer is Configured
Our gyro stabilizers make use of this strange phenomenon. By spinning the flywheel in a cage (the vacuum chamber), which in turn is then suspended on a shaft that runs on bearings across the beam of the vessel (athwartships), we allow the flywheel to rotate in only two of the possible three degrees of freedom. It can spin about its spin shaft axis, it can rock back and forth in its precession bearings, but it cannot rotate (roll) in the ship roll axis. Setting the flywheel up this way allows us to make use of the 90 degree-bending-of-torque-into-rotational-motion (gyro- dynamics) of a flywheel.
This is how gyro-dynamics works to make a gyrostabilizer:
First, waves cause the ship to roll about it’s roll axis. Because the spinning flywheel is effectively locked into the ship’s roll axis by the precession bearing mounts, the flywheel also rolls about this roll axis.
Second, this rolling rate on the spinning flywheel creates a torque at 90 degrees to the roll axis. That is, on the ship’s pitching axis (bow to stern) and the gyro’s precession axis.
Third, because we have allowed the flywheel to rotate in the ship’s pitching axis (instead of hanging-on and stopping this motion, as in the grinder case), the applied torque results in a rotational rate about the precession axis.
(The roll rate of the vessel directly determines the rate of precession)
Fourth, now that the flywheel is rotating about the precession axis, the gyro- dynamics creates a torque at 90 degrees to the precession axis. This happens to be the ship’s rolling axis. Very conveniently for us, the torque created by the combination of the flywheel’s angular momentum and the precession rate is in exactly the opposite direction to the rolling motion of the vessel. So, we have a device that naturally wants to oppose the wave-induced rolling motion of the vessel.
If we did not allow the flywheel to rotate in the ships pitching axis (to precess), then there would be no stabilizing effect at all. This is how we turn the gyrostabilizer OFF at sea when we don’t want stabilization. We simply lock the precession axis to prevent the flywheel from rocking in the ship’s pitching axis. Instantly the generation of stabilizing torque stops. In reverse, when we want to turn the gyrostabilizer ON, we simply unlock the precession axis to allow the flywheel to start rocking backwards and forwards again. The stabilizing torque immediately begins to be generated again as soon as the vessel rolls; following the steps described above.
Gyro stabilizers are smooth and operate seamlessly unlike fin stabilizers which produce a slight jerkiness that you can feel when they are working. These jerky motions are caused by completely different things when the vessel is underway, and when at rest. In contrast, gyro stabilizers provide extremely smooth stabilization. The difference must be experienced to be believed.
Because a gyrostabilizers’ roll stabilizing torque is created by the rolling motion itself, there is absolutely no time delay, or lag, between the wave-induced rolling motion and the stabilizing torque produced by a natural precession gyrostabilizer.
The result is an amazingly smooth application of the massive stabilizing torques produced. In practice, the experience of turning the gyro ON is fundamentally different from fin stabilizers. There is simply a calm, relaxing reduction of rolling motion.
This sensation has to be experienced to be understood. For too long, the yachting community has believed that the trade off for a reduction in rolling motion was an unpleasant jerkiness. This no longer is the case.
So, what are the main differences between fins and gyrostabilizers?
Gyrostabilizers are Safe for Swimmers – Many Captains will not run zero speed fins when guests are swimming in the vicinity of the yacht for safety reasons. This understandable and responsible, however this compromise between the comfort of those onboard, and swimmers is not required with a gyrostabilizer installation as there are no appendages in the water.
Reduced Drag, Higher Hull Efficiency – On most yacht installations, selecting a gyrostabilizer over zero speed fins will result in Higher Speed, Increased Range, and Fuel Savings. The trade off is between the increase in mass between a fin installation and a gyrostabilizer. The increased mass does represent a hull drag cost, however when compared to the drag of inefficient low aspect ratio zero speed fins (especially if they are actually working), a significant net reduction in drag is achieved.
No Risk of Grounding Damage – We have all experienced or heard stories of stabilizing fins being damaged by collision with floating debris, or grounding. This usually results in time consuming and expensive dry-docking for repair of replacement. This is simply not possible with a gyrostabilizer located inside the hull.
No Fouling with Nets or Cables – The risk of fouling fishing nets, long lines, buoy anchors, or cables is removed completely with a gyrostabilizer located inside the hull.
No Equipment Outside of the Engine Room – By locating the gyrostabilizer(s) in the engine room, noise levels are reduced as compared to fins (most important at night), and there is no requirement for technical personnel to enter the owners spaces for operational or maintenance tasks related to fins.
No Dry-Docking for Maintenance, Ever – Dry-docking is a hectic and crammed period, with many systems requiring attention. A VEEM Gyro can be fully maintained (including major over-haul) within the vessel. So take a few lines off the docking list by selecting a gyro over fins.
Simple Installation – No Need to Run Cables and Piping Through Frame Penetrations – Enough said. Having the gyro delivered as a fully self-contained item of equipment saves a vast amount of time, effort and money coordinating frame penetrations, cable runs and piping runs through the hull.
As a relatively new product, there are still several myths about Gyrostabilizers that we wanted to clear up.
In fact, just as important is the way in which precession motion is controlled. The major considerations that define the performance of a gyr stabilizer are: flywheel angular momentum, the precession range allowed, the maximum precession rate allowed, and the ability of the gyrostabilizer to maintain full precession range when vessel rolling rates are low. All of these considerations are handled differently by the various vendors of gyro stabilizers.
Understanding exactly how each unit works will allow the most informed selection of the best gyrostabilizer system for your application. A good place to start is to find out exactly how much stabilizing torque is generated across a range of rolling periods. This will unearth many of the considerations discussed above.
It is also very important to understand what the operational envelope of the gyrostabilizer is. Will the unit continue to operate in rough conditions when you need it most? In what conditions (if any) will the unit shut down or de-rate to protect itself?
This is theoretically possible, but not a practical reality. The resulting uncomfortable harmonics introduced into the rolling motions of the yacht would create a significantly less comfortable experience for those on-board.
Given that there is a finite range of precession available before the stabilization torque starts to increase rolling motion, if you accelerate precession motion through some of that range then you need to decelerate this motion somewhere else in the cycle.
These accelerations can be felt by guests as ‘wobbles’ in the rolling motion that are hard for a human to predict and therefore make walking and general balance more difficult. So while it theoretically possible to do this, it is not a practical solution. If it sounds too good to be true…then it probably is.
In fact, in very small waves where the gyrostabilizer is not overpowered, a vertical axis gyrostabilizer could work without any control system whatsoever. A horizontal axis gyrostabilizer would also work a little, but the very high resistance to precession of the slew ring bearings used on these systems would significantly limit the stabilizing torque generated.
Stabilization torque is not caused by the precession axis braking torque, it is caused by the precession oscillation rate combining with the angular momentum of the flywheel to generate torque in the roll axis.
The precession braking is only applied to manage the precession motion to within a nominated precession oscillation range and in most cases also to limit the rate of precession oscillation so that the gyrostabilizer torque created is effectively capped allowing the supporting structure to be designed to withstand a defined maximum level of load.
Because a gyrostabilizer produces a pure torque, it can theoretically be located anywhere on the vessel. The stabilizing torque will always neatly oppose the rolling torque whether on or off vessel centre-line, or whether forward or aft.
To avoid high vertical accelerations that might shorten the life of the bearings, VEEM recommends that the unit(s) are located aft of mid-ships. However when required it is possible to locate them up to 70% of LWL forward of the transom.
So long as the overall mass distribution of the vessel is maintained, there is absolutely no performance disadvantage to locating the gyrostabilizer(s) off centerline.
If the gyrostabilizer(s) are located more than 2m above the waterline, please discuss this with VEEM. The flexible rubber isolation mounts may need to be transversely supported to prevent over-load.
In most cases, the convenience of electrical power supply and suitably strong supporting structure will result in the gyrostabilizer being located within the engine room. This has the added advantage of enclosing the gyrostabilizer within a noise lagged space. Where the gyrostabilizer(s) are located outside of the engine room, noise isolation considerations should be addressed.
Gyrostabilizers can be conveniently located as far from the owner’s spaces as practical. This helps to eliminate annoying night-time noise, and to ensure that service technicians do not need access to the owners spaces.
So in summary, the gyrostabilizer can be located:
• Up to 70% LWL forward of the transom
• Off centre-line
• Up to 2m above waterline
In fact, a pre-1900 gyrostabilizer invention claimed to work without precession. This was eventually debunked and the invention discredited. The stabilizing torque is created by the combination of the flywheel’s angular momentum and the precession oscillation rate.
If the flywheel does not precess, no stabilization torque is generated. This is how a gyrostabilizer can be turned OFF without stopping the flywheel from spinning. The precession oscillation axis is simply locked.
In fact a spinning flywheel does not have any inherent stability, or tendency to remain at its current orientation. As we have discussed above, a flywheel does have very specific gyro-dynamics that cause it to bend and applied torque through 90 degrees as a rate of precession, or to bend a rotational motion through 90 degrees as a torque. However there are many specific flywheel applications where the flywheel does provide a stabilizing influence.
These include the spinning top children’s toy, the front wheel of motorcycle or bicycle, and happily, a marine gyro stabilizer. However each of these applications applies gyro-dynamics in a unique way, and is not related to any inherent stability of a flywheel, but the way that it bends torque through 90 degrees.
Get a VEEM Gyro Size estimate estimate instantly for your vessel across different wave profiles
Latest VEEM Marine news and ASX Announcements
© 2024 VEEM Marine. Website by Lumos Marketing